Как устроен полный привод тойота хайлендер

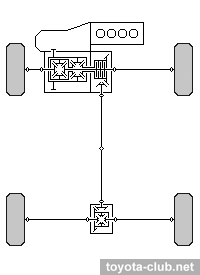
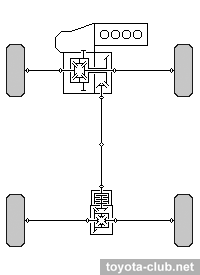
Постоянный полный привод. Межосевой дифференциал — симметричный конический (распределение момента между передними и задними колесами 50/50), блокировка — многодисковой гидромеханической муфтой.
A241H — коробка передач с простым гидравлическим управлением и контроль блокировки в ней достаточно примитивен (подробное описание — «АКПП A241H»), тогда как в более совершенной A540H реализовано полноценное электронное управление с обратной связью (подробное описание — «АКПП A540H»).
Максимальный коэффициент блокировки реализуется системой управления в диапазонах «L» и «R».
Включаемый с помощью кнопки режим «C.DIFF AUTO» разрешает блоку управления автоматически выбирать коэффициент блокировки в зависимости от условий движения, при его отключении межосевой дифференциал остается в свободном состоянии. Кнопка присутствует на всех моделях с A241H и на ранних моделях с A540H (на моделях после 1994 г. кнопка отсутствует и автоматический режим задействован постоянно).
Номинальным для повседневной езды является именно автоматический режим, его отключение предусматривается только при буксировке машины или использовании запасного колеса-докатки (выдержка из инструкции).
 |
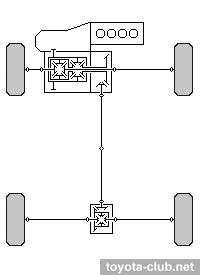
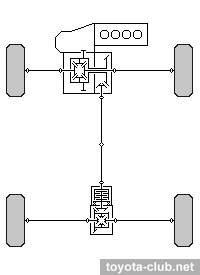
Постоянный полный привод. Межосевой дифференциал — симметричный конический (распределение момента между передними и задними колесами 50/50), блокировка — вязкостной муфтой.
В данной схеме часто использовался опциональный задний самоблокирующийся дифференциал типа Torsen.
 |
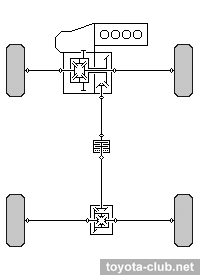
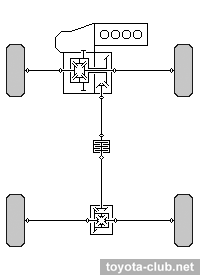
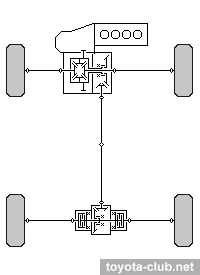
Постоянный полный привод. Межосевой дифференциал — симметричный конический (распределение момента между передними и задними колесами 50/50), свободный.
Эмуляция блокировок осуществляется при помощи системы стабилизации (VSC) — буксующее колесо принудительно подтормаживается, тем самым момент на другом колесе той же оси увеличивается. Аналогичным образом момент перераспределяется между передней и задней осями.
| 1.2. Подключаемый полный привод |
 |
Постоянный передний привод, без межосевого дифференциала, подключение задних колес вязкостно-фрикционной муфтой.
Муфта RBC соединяет две части промежуточного карданного вала и срабатывает при пробуксовке передних колес, в остальное время машина остается переднеприводной.
 |
Постоянный передний привод, без межосевого дифференциала, подключение задних колес вязкостно-фрикционной муфтой.
Вискомуфта соединяет две части промежуточного карданного вала и срабатывает при пробуксовке передних колес, в остальное время машина остается переднеприводной.
 |
Постоянный передний привод, без межосевого дифференциала, подключение задних колес вязкостной муфтой.
Вискомуфта, заполненная силиконовой жидкостью, соединяет карданный вал с входным валом заднего редуктора, срабатывает при существенной пробуксовке передних колес, в остальное время машина остается переднеприводной.
* — модели Daihatsu, реализуемые под маркой Toyota
 |
Постоянный передний привод, без межосевого дифференциала, подключение задних колес электромеханической муфтой.
Муфта соединяет карданный вал с входным валом заднего редуктора. В большинстве случаев машина остается переднеприводной, однако при необходимости система управления автоматически поддерживает запрограммированное значение момента, передаваемого на задние колеса.
Изначальное наименование — «Active Torque Control», после 2012-го на некоторых моделях система получает обозначение «Dynamic Torque Control».
Существует несколько вариантов реализации управления со стороны водителя:
 |
 |
• С кнопкой «AUTO» (легковые модели и минивэны) — режимы «AUTO 4WD» и «2WD». В выключенном состоянии привод осуществляется только на передние колеса, во включенном — блоку разрешается управление автоматическим подключением задних колес.
• С кнопкой «LOCK» (паркетники) — режимы «AUTO 4WD» и «LOCK». Обычным является режим автоматического управления подключением полного привода, нажатие кнопки заставляет блок поддерживать максимально возможную степень блокировки электромеханической муфты.
• Без кнопок (некоторые модели японского рынка) — постоянно задействован режим автоматического управления полным приводом.
—>
* — модели Daihatsu, реализуемые под маркой Toyota
 |
Постоянный передний привод, без межосевого и заднего дифференциалов, подключение задних колес независимыми муфтами.
В большинстве случаев машина остается переднеприводной, при необходимости система управления автоматически регулирует значение момента, передаваемого на каждое из задних колес. Кроме того, предусмотрено размыкание силовой передачи в раздаточной коробке и заднем редукторе, чтобы в режиме 2WD карданный вал и шестерни не вращались впустую.
Официальное наименование — «Dynamic Torque Vectoring AWD», схема представлена в 2018 году.
Подробное описание и неисправности — «Полный привод Toyota. DTV AWD»
| 1.3. Электрический полный привод |
Постоянный передний привод, без механической связи между осями, подключаемый привод задних колес отдельным электродвигателем.
Применяются два типа задних силовых модулей с электродвигателем и редуктором — классический трехвальный (в нескольких вариантах мощности и крутящего момента) и компактный двухвальный с маломощным электромотором (HV4WD).
Условные обозначения: TM — трансмиссия (коробка передач, вариатор), TR — раздаточная коробка, FD — передний дифференциал, RD — задний дифференциал, CD — межосевой дифференциал, CDC — гидромеханическая муфта, VC — вязкостная муфта, EC — электромеханическая муфта.
| Развитие, эффективность, надежность |
Отсчет времени для тойотовского 4WD на исходно-переднеприводных машинах можно вести с 1988 года.
Схема STD I, появившаяся в самые «тучные годы» японского автомобилестроения, так и осталась наиболее совершенной, надежной и эффективной среди всех вариаций полного привода легковых тойот. Этот «Full-Time 4WD» действительно был постоянным, полным и, что немаловажно, строился на базе беспроблемных и выносливых автоматических коробок. Единственный принципиальный недостаток (по современным меркам) — это отсутствие каких-либо межколесных блокировок, что делает машины чувствительными к условному диагональному вывешиванию. К сожалению, выпуск последних моделей с STD I завершился еще в 2002 году.
Для моделей самого младшего B-класса тойотовцы ограничились подключаемым полным приводом по схеме V-Flex I и придерживались этой концепции с конца 1980-х вплоть до 2010-х. В настоящее время схема применяется на единственной, утилитарной модели Toyota.
Затяжной кризис 1990-х сделал новым трендом тотальную экономию — на материалах, на полезных опциях, и, конечно же, на совершенстве конструкций. Для тойотовского 4WD перелом наступил после 1997-го — с запуском и массовым внедрением схемы V-Flex II одна из самых продвинутых систем менялась на самую примитивную. Ее врожденные недостатки общеизвестны:
— запаздывающее «срабатывание» вискомуфты,
— ограниченная степень блокировки,
— потенциальная опасность при активной езде,
— низкая долговечность самой муфты.
Разумеется, даже такой сомнительный 4WD оставался предпочтительнее монопривода, но проблема в том, что опытным тойотовладельцам было с чем его сравнивать. После 2015-го на собственных тойотовских разработках V-Flex II больше не применяется, оставаясь атрибутом только ребейджинговых моделей Daihatsu.
Наиболее распространенный сегодня в мире тип полного привода — с электромеханической муфтой подключения задних колес — появился на тойотах еще в 1998-м (ATC). Изначально — на минивэнах, но постепенно он пришел и в младшие классы, вытеснив V-Flex, и на паркетники, ликвидировав остатки full-time. Недостатки схемы:
— ограниченная степень блокировки,
— ограниченное время работы под нагрузкой,
— износ опорных подшипников муфты (подробнее см. «Ремонт муфты ATC 4WD»).
В целом, по эффективности ATC не дотягивает до постоянного полного привода, но ощутимо превосходит V-Flex.
Стоит отметить еще один момент — конец 1990-х ознаменовался появлением новых моделей автоматов Toyota/Aisin (последние версии серии A24#, U-серии), ресурс которых по сравнению с предшественниками радикально уменьшился, что было особенно ощутимо в условиях повышенных нагрузок от полного привода. В итоге, 4WD-трансмиссии стали не только менее эффективными, но одновременно и менее надежными.
Для только набиравшего в то время обороты класса паркетников/кроссоверов тойотовцы сохранили постоянный полный привод в максимально упрощенном варианте (STD II), который фактически позаимствовали у прежних моделей с механическими коробками (разве что поместив в межосевой дифференциал пять сателлитов вместо четырех). Ожидаемо низкая эффективность вязкостных муфт по сравнению с гидромеханическими отразилась на эксплуатационных характеристиках и в этом случае.
К середине 2000-х развитие технологий позволило полностью отказаться от вискомуфт, оставив все три дифференциала свободными (VSC+) — теперь блокировки эмулировались с помощью тормозной системы. Такое решение оставалось в производстве не слишком долго и уже спустя поколение все паркетники получили полный привод типа ATC.
Вообще, с активным внедрением систем стабилизации (у японских марок — со второй половины 2000-х) и появлением эмуляции блокировок межколесных дифференциалов с помощью тормозов, в мире начался новый этап развития полного привода. У некоторых производителей связка подключаемого 4WD и ESP дает лучший эффект, чем даже некоторые варианты классического постоянного полного привода с излишне «мягкой» блокировкой центра или ее эмуляцией. Но не в случае Toyota — сравнивая реальное поведение современных паркетников разных марок нужно признать — тойотовские настройки подключаемого полного привода и эмуляции межколесных блокировок являются крайне неудачными. Некоторые качественные улучшения здесь наметились только с выходом новых моделей в самом конце 2010-х.
Не лучшим образом отразился на возможностях полного привода отказ от автоматов в пользу вариаторов, постепенно идущий с середины 2000-х (моноприводные версии получали их еще раньше). Если для легких машин младших классов это не так принципиально, то для минивэнов и, тем более, кроссоверов именно вариатор становится наиболее узким, уязвимым и дорогим местом в цепи передачи мощности от двигателя к колесам.
Еще один тип условно полного привода, известный еще с 2001-го, сформировали многочисленные гибридные модели (E-4WD). При внешней заманчивости идеи, красивых цифрах и графиках крутящего момента заднего электромотора, в реальности тяговые возможности не оправдали ожиданий — по эффективности E-4WD не дотягивает даже до ATC аналогичных не-гибридных моделей.
Собственную схему, работающую по принципу «torque vectoring» (DTV) Toyota представила только в 2018-м, лет на восемь позже ниссана, почти на пятнадцать позже хонды и спустя два десятилетия после MMC. Potius sero quam nunquam.